
Flightcontrol mit INAV
Die Technik aus einer Drohne (Sorry, Multicopter ;) ) lässt sich auch auf Motorsegler oder Nurflügler übernehmen.
Für normales Fliegen wird dies natürlich nicht benötigt, aber für Technikbegeisterte oder FPV-Piloten hat das natürlich seine Vorteile, zum Beispiel:
- Autostart (Nav Launch)
- Flugstabilisierung (Angle)
- In der Luft "parken" (Pos Hold)
- Automatisches zurückfliegen zum Startpunkt (RTH)
Was wird benötigt:
- klar, ein Flieger
- ein PPM oder S.Bus Empfänger (min. 6 Kanäle)
- ein Flightcontrol (z.B. Omnibus F4 V3, ca.25€)
- für RTH und Pos Hold ein GPS (Ublox Neo M8N, ca. 20€)
- ein Windows-Laptop zum Einstellen des Flightcontrol
- Google Chrome mit INAV (<<klick)
Step 1:
Zuerst wird Google Chrome mit dem INAV-Configurator auf dem Windows benötigt. Danach flashen wir die INAV-Software auf den Flightcontroller (FC):
-
Verbinde den FC mit dem PC, dabei drücke den Knopf am FC.
-
Starte INAV Configurator. Oben rechts muss "DFÜ" als Verbindung stehen.
-
Klicke auf "Disconnect" falls der Configurator auf "automatically" steht. Deaktiviere "AutoConnect"
-
Klick auf "Firmware Flasher".
-
Klick auf "Load Firmware [Online]".
-
Klick auf "Choose a Firmware / Board" Menü und wähle die letzte Version deines FC´s.
-
Wenn dies das erste mal flashen ist, dann wähle "Full Chip Erase" mit aus.
-
"Connect" wieder mit dem PC. Richtigen Com-Port gewählt??
-
Klick auf "Flash Firmware" und warte....
-
Wenn "Programming: SUCCESSFUL" erscheint ist der Flashvorgang abgeschlossen.
-
Falls der Configurator das Board nicht erkennt, kann ein anderer Treiber helfen. Dazu gibt es Zadig (klick).
Die zwei Bilder rechts zeigen die Einstellung wie der Flashvorgang bei mir funktionierte...


Step 2:
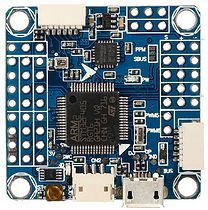
Erst wenn der Flashvorgang funktioniert hat, löten wir die Steckerleiste an und wählen den richtigen Empflängertyp aus. Dazu muss eine Brücke zwischen dem mittlerem Lötpad und dem entsprechendem Pad (SBUS oder PPM) gelötet werden. Bevor wir die Servos und den Motor anstecken, wird der der FC kalibriert. Das ist recht einfach im Configurator beschrieben. Der Pfeil auf dem Board zeigt die Flugrichtung an.
PS: Am einfachsten funktioniert ein PPM-Empfänger.

Step 3:
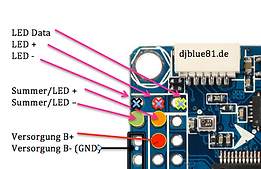
Jetzt werden die Kontaktstifte angelötet. Sobald diese verbaut sind, kann das Modul mit Servos, Motorregler, etc verbunden werden und im Modell verbaut werden.
Das Bild ist nahezu selbsterklärend. Links unten muss Video Voltage (Vbat) mit einem Lötpunkt (orangener Strich) zu 5V+ oder zu Versorgung B+ verbunden werden. Somit erhält der Video Voltage-Anschluss rechts oben die entsprechende Spannung.
TX/RX ist fürs GPS.
An Versorgung B+ kann bis zu 6s-Lipo angeschlossen werden. Von hier wird auch das eigene BEC fürs Board, Video, GPS und Empfänger generiert. Die Servos erhalten das BEC vom Motorregler.
Statt einem Buzzer kann auch eine LED verwendet werden.
Die Servos werden entsprechend dem Bild rechts angeschlossen.
Im Sender darf kein Mischer aktiv sein.
Step 4:
Der Sender muss auf das FC kalibriert werden, damit das FC weiß wann "Vollausschlag" und "Knüppelmitte" ist. Das wird über Servoumkehr, Servoendpunkt und Servomitte im Sender gemacht. Im INAV Configurator geht man hier auf Receiver. Dort sieht man für jeden Kanal seine Ausschläge. Minimum-Ausschlag sollte bei 1000us sein.
Mitte Ausschlag bei 1500us und
Voll-Ausschlag bei 2000us.
Dies wird bei allen verfügbaren Kanälen gemacht.
Vollgas = Balken wird voll
Seitenruder rechts = Balken wird voll
Höhenruder voll tiefe = Balken wird voll
Querruder rechts = Balken wird voll
Die Servolaufrichtungen am Modell werden im Tab "Servos" eingestellt, nicht im Sender!!
siehe Step 9!!




Step 5:
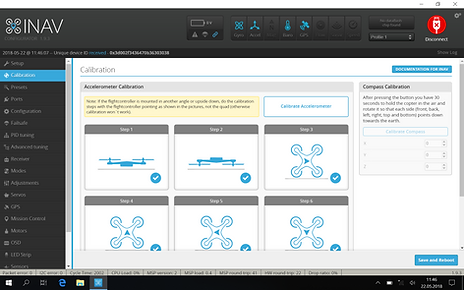
Nun werden die Lagen der FC kalibriert. Dazu muss der FC (nicht das Modell) in sämtliche Richtungen wie auf den Bilder gedreht und gehalten werden. Auch hier, auf dem Pfeil achten.
Sollte der FC z.B. senkrecht im Modell verbaut worden sein, kann dies in den Einstellungen geändert werden.
Step 6:
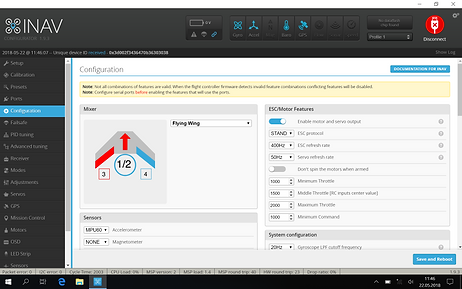
Jetzt sagen wir dem FC was es in Zunkunft zu steuern hat: Copter, Flächenflieger, Wing, etc.
Dazu gibt es vergleichbare Modell zur Auswahl. Mit der richtigen Auswahl werden verschiedene Voreinstellungen bereits getroffen.

Step 7:
Unter Configuration können weitere Einstellungen getätigt werden. Es lohnt sich auf jeden Fall mal die ganzen Punkte sich anzuschauen, evtl. passt ja was nicht??
Step 8:
Auch die Failsafe-Einstellungen sollten sind eines Blickes wert. Bei ausgeschaltenem Sender muss oben in der Mitte der Fallschirm gelb leuchten!!!

Step 9:
In der Servoeinstellung werden nun die Mitten und die maximalen Ausschläge eingestellt. Für jedes Servo einzeln. Die Nummerierung entspricht der Anschlussreihenfolge aus Step 3.
Die Laufrichtung jedes Servos lässt sich Rechts im "Dropdown"-Menü einstellen. Mit einem Minus vor der Prozentanzeige bedeutet "umgekehrte" Laufrichtung.

Step 10:
In "Modes" werden die verschiedenen Flugzustände entsprechend ein/ausgeschalten.
Wichtig ist hier "ARM" was soviel bedeutet wie "Scharf geschalten". Nur wenn geARMt ist, kann der Motor betätigt werden, oder oder oder....
Hier mal die wichtigsten Modes:
Angle stabilisiert den Flieger beim Loslassen der Steuerknüppel.
Airmode ist eine Allround-Flugstabilisierung.
Bei Manual gibts keine Zusatzfunktion. Die Steuerung ist wie ohne FC.
RTH, Althold, Poshold sind Funktionen zum "automatischen Zurückfliegen, Höhe halten und und und... vereinzelt wird GPS benötigt.
Autotrimm ist eine automatische Trimmfunktion.
Hier werden nach Aktivierung die Mittelwerte der nächsten 5 Sekunden im Geradeausflug ermittelt. Zum Speichern darf der Modus erst nach dem Landen und nach "disARMen" deaktiviert werden.
NavLaunch ist ein Startassistent.
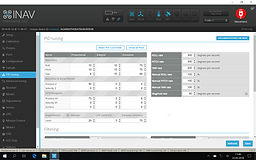
Unter PID-Tuning werden die Regelparameter für die Stabilisierung eingestellt. Hier gibt auch einen Selbstlernmodus in den "Modes".
Unter Advanced Tuning werden die Parameter für das automatische und autonome Fliegen definiert.


Step 11:
Wer möchte sollte (muss nicht) noch folgende CLI´s eintragen. Leider gibt es dazu noch keine Eingabemöglichkeit.
set max_angle_inclination_rll = 650 Maximaler Winkel für Roll im stabilisierten Flugmodus.
set max_angle_inclination_pit = 650 Maximaler Winkel für Höhe/Pitch im stabilisierten Flugmodus.
set small_angle = 180 Ermöglicht das "ARM"en in jeder Lage
set failsafe_throttle_low_delay = 0 Standardmäßig geht INAV in den Failsafe wenn Gas im Flug mehr als 10 Sekunden
auf "aus" steht. Mit diesem Befehl könnt ihr das deaktivieren.
set nav_extra_arming_safety = OFF Wenn ein GPS angeschlossen ist, verweigert INAV das Armen so lange, bis
genügend Satelitten für 3D-Fix vorhanden sind. Damit kann man dies deaktivieren.
set disarm_kill_switch = OFF Damit lässt sich per Arm-Schalter nur "Disarmen" wenn Gas auf Null ist.
set failsafe_throttle_low_delay = 0 Damit verhindert man das der Wing im Gleiten (10s. Gas auf Null) alleine disarmt
Erstflug...
Beim Erstflug starten wir ohne Startassisten oder sonstigen Modes. Es wird in "Manual" gestartet. Zum Scharfschalten des Fliegers ans "ARM" denken!!!
PS: Nicht übern Sender trimmen!!!
Viel Glück
Wenn die ersten Flüge gut vonstatten gegangen sind, können die Modes "Angel" und "Autotrimm" bei ausreichend Höhe ausprobiert werden.
Stickcommands:
Kleinere Einstellungen lassen sich auch direkt am Flugplatz vornehmen. Dazu gibt es die Stickcommands.
Meist findet man nur diese Commands für Mode 2, hier mal für Mode 4:

Weitere Funktionen mit der Flightcontrol und INAV
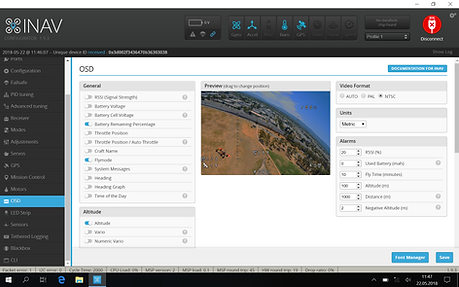
OSD:
Wird eine FPV-Kamera und ein VTX verwendet, können versch. Daten eingeblendet werden.
Im OSD-Menü können hier die Daten ausgewählt werden und am angezeigten Musterbild platziert und verschoben werden.
Ports:
Wird ein GPS-Modul (oder andere Zusatzgeräte) verwendet, müssen die verwendeten Ports auf die Geräte eingestellt werden.
Wird z.B. das GPS an TX1/RX1 angeschlossen, muss auch bei UART1 bei Sensors ebenfalls GPS ausgewählt werden und die richtige Baud-Rate eingestellt werden.

CLI:
Hier können Einstellungen gemacht werden die in der Software nicht genannt sind. Dazu sind CLI-Codes nötig. Natürlich alles in Schriftform...
Auch Backups können gemacht werden.
Aber Vorsichtig, man kann auch viel Schaden anrichten...
LED:
Mit WS2812b-LEDs können verschiedende Funktionen angezeigt werden. z.B.:
Blinker, Rückwärtsfahrt, Himmelsrichtungen,
Status wie GPS, Arm und Batterie, Fehler, etc.
Es können bis zu 32 LED´s im Verbund betrieben werden. Jede einzelne LED kann eine eigene Funktion bekommen. Die Datenleitung der LED´s muss nur in Reihe durchgeschleift werden, also FC LEDData an LED1 DataIN, LED1 DataOUT an LED2 DataIN usw.
Oder man kauft fertige WS2812b-LED-Strips...
In meinem Beispiel wurden 3 LED´s zur Statusanzeige von GPS, Batterie und Arm genommen. Leuchten alle grün, kann sorglos gestartet werden....
Zuerst sollte natürlich die Funktion im Menüpunkt Configuration aktiviert werden und die LED angeschlossen werden.
Im Menüpunkt LED Strip muss zuerste "Wiring Mode" aktiviert werden und entsprechend viele LEDs aktiviert werden. Jede LED bekommt der Reihe nach eine Nummer zugewiesen.
Danach kann der Wiringmode deaktiviert werden. Jede einzelne LED kann nun angeklickt werden und die entsprechende Funktion rechts dazu ausgewählt werden. Es können natürlich auch mehrere LED die gleiche Funktion erhalten.
Speichern... fertig....
Indicator = Blinker
Warning = Warnung
Throttle = Gas
Color = Lauflicht
Ring = Nachbrenner



Autolaunch:
Mit der Autolaunch lässt sich ein Flieger automatisch in die Luft bekommen. Einfach werfen, den rest macht der Flieger alleine. Nach de Autolaunch-Ablauf übernimmt der Flieger die Einstellungen vom Sender, also Knüppelstellungen und Schalter sowie deren zugewiesenen Funktionen. Dazu ist GPS nötig und ein gut eingestellter und funktionierender Angle-Mode.
Autolaunch lässt sich ebenfalls über CLI-Kommands einstellen:
Maximaler Wurfwinkel, wird der Winkel überschritten, erfolgt kein Autolaunch
Erlaubter Bereich: 5 - 180, Standard 45,
Empfehlung 180 Grad, dann wird jeder Wurf zuverlässig erkannt
set nav_fw_launch_max_angle = 45
Gasposition beim Autostart, 1800 = 80 %
Erlaubter Bereich: 1000 - 2000, Standard 1700,
Empfehlung: eher möglichst hoch, gerade bei großem Steigwinkel, schwachen Motoren oder schweren Modellen
set nav_fw_launch_thr = 1700
Motordrehzahl nach Scharfstellen VOR Launcherkennung (gefährlich bei Heckmotoren)
Erlaubter Bereich: 1000 - 2000, Standard 1000 (=0%),
Empfehlung bei schwachen Motoren oder Klapppropellern 1200 bis 1400 (20 bis 40%)
set nav_fw_launch_idle_thr = 1000
Zeitspanne (ms) zwischen Wurferkennung und Motorstart
Erlaubter Bereich: 0 - 5000, Standard 500,
Empfehlung 200 (0,2 Sekunden)
set nav_fw_launch_motor_delay = 500
Zeitspanne bis Motor auf volle eingestellte Drehzahl geht (in ms)
Erlaubter Bereich: 0 - 1000, Standard 100, Empfehlung 100
set nav_fw_launch_spinup_time = 100
Steigwinkel bei Autolaunch in Grad
Erlaubter Bereich: 5 - 45, Standard 18,
Empfehlung bei stärkeren Motoren 25 bis 30, mind. 20, 18 ist wenig.
set nav_fw_launch_climb_angle = 18
Beschleunigungswert bei dem AUTOLAUNCH erkannt wird
Erlaubter Bereich: 1000 - 20000,
Empfehlung 1500 bis 1600 bei schweren Modellen
set nav_fw_launch_accel = 1863
Zeitraum in Millisekunden in dem der Beschleunigungswert zur Erkennung des Autolaunch überschritten werden muss
Erlaubter Bereich: 10 - 1000, Standard 40 kann so bleiben
set nav_fw_launch_detect_time = 40
Zeitspanne (in ms) in dem der Launchmodus nicht unterbrochen wird, auch nicht durch Stick-Eingaben
Erlaubter Bereich: 0 - 60000, Standard 0,
Empfehlung 2000 (2 Sekunden), um nicht versehentlich den Autolaunch zu unterbrechen wenn während der Wurfbewegung sich die Knüppel bewegen sollten.
set nav_fw_launch_min_time = 0
Zeitraum in dem der Autolaunch durchgeführt wird, danach gelten die Einstellungen der Fernsteuerung inklusive Gas, Modus, etc.
Erlaubter Bereich: 0 - 60000, Standard 5000,
Empfehlung 10000 (10 Sekunden, kann durch Stickeingaben unterbrochen werden, aber erst nach Ablauf launch_min_time)
set nav_fw_launch_timeout = 5000
Höhe in cm bei dem der Launchmode automatisch beendet wird, danach gelten die Einstellungen der Fernsteuerung inklusive Gas, Modus, etc.
Erlaubter Bereich: 0 - 60000, Standard 0,
Empfehlung 50 (Meter) = 5000 oder identisch mit der RTH-Höhe
set nav_fw_launch_max_altitude = 0
Und ganz zum Schluss: "Save" nicht vergessen
Meine persönliche Empfehlung:
Vor dem Autolaunch gleich auf RTH schalten, so kreist der Flieger im Anschluss über dem Homepoint. Da hat man dann genug Zeit die Videobrille aufzusetzen und sich in seinen Stuhl zu setzen.

